
Camera Calibration
앞에서 intrinsic, extrinsic parameter 를 알아야 정확한 transformation이 가능하다고 했다.
하지만 임의의 카메라를 처음 쓰게 되면, parameter들에 대한 정보가 없다.
하지만 그 카메라로 image를 촬영할 수는 있다.
따라서 해당 image를 이용해 extrinsic, intrinsic camera parameter들을 추정하는 것이 바로 camera calibration이다.

위의 사진은 calibration rig 를 보여준다.
이 rig는 보통 그림처럼 차원을 가진 simple한 패턴으로 구성되고,
더 나아가 rig는 world reference를 원점
이 때, world reference frame에서 우리가 알고있는 점들
해당 점들에 상응하는 image의 점들
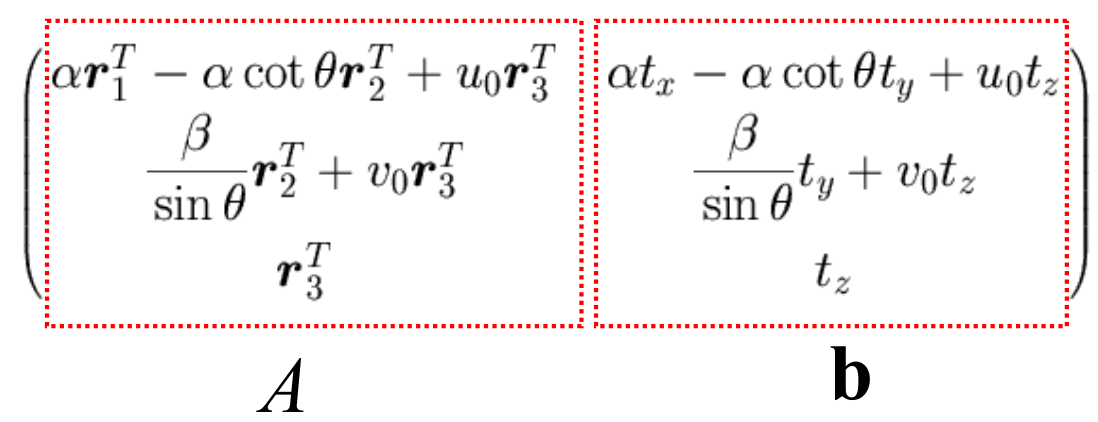
그 후, n개의 3D, 2D 포인트 쌍으로부터 아래와 같이 linear system of equations을 유도해낸다.
(
위의 식에서 각
따라서
앞에서 camera matrix 는 11개의 unknown parameter가 있다고 했었다.
따라서 6개의 correspondence만 있으면 이 matrix를 찾을 수 있다.
하지만 실제 세상에서는, 정확하게 측정되기 어렵기 때문에 noise가 있을 수 밖에 없다.
이걸 matrix-vector product 형태로 바꾸면,
(위의
그런데
뿐만 아니라 nonzero solution이 아닌
따라서 solution에 constraint을 줘야한다.
따라서 minimization을 완성시켜보면 다음과 같다.
위의 minimization problem을 풀려면, 그냥 singular value decomposition(SVD)를 이용하면 된다.
이렇게 얻은
이
즉 실제 camera matrix는
가 된다. (
이를 scaling parameter
이고,
전개해서 풀면 intrinsic parameter는
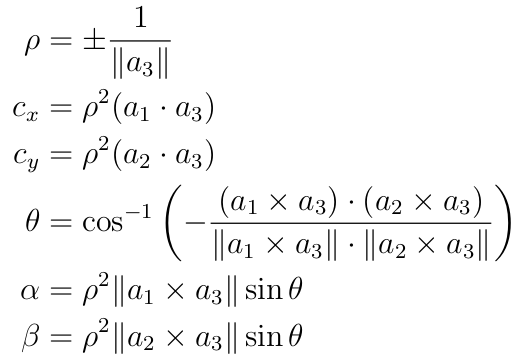
이고, extrinsic parameter는
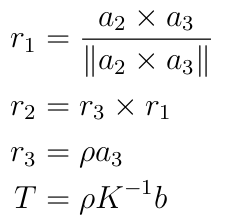
과 같다. (유도 과정은 강의 범위를 벗어나므로 생략)
유의할 점으로는, 위의 과정에서 degenerate case가 발생할 수도 있는데,
예를 들어, 모든
이와 같은 점들을 degenerate configurations라고 부른다.
'3D\Multiview Geometry > CS231A' 카테고리의 다른 글
| CH02. Single View Metrology (2) (0) | 2023.02.09 |
|---|---|
| CH02. Single View Metrology (1) (0) | 2023.02.08 |
| CH01. Camera Models (4) (0) | 2023.02.06 |
| CH01. Camera Models (2) (0) | 2023.02.05 |
| CH01. Camera Models (1) (0) | 2023.02.05 |